|
|
|
In-Station Testing
The In-Station Testing procedure contained within the Nortel Commissioning
Procedure document details path continuity,path protection & equipment
protection tests to be carried out between two interconnected Nortel
TN-4XE switches (dependant on actual cards equipped).
The testing procedures are well detailed but this part of the commissioning
is the first time that a real understanding of KLM notation is required to
enable the tests carried out to be meaningful.
Note the pathways to be tested are set up during the Preliminary Procedures 3.25
Before KLM numbering is explained it is important to understand the basic frame rates used in SDH as well as the actual make up of a STM-N frame.
The basic SDH signal is called the Synchronous Transport Module (STM). The primary data rate produced on a SDH network is STM-1. This runs at a rate of 155.52Mbit/s. Interleaving the lower rate STM signals allows higher level STM-4, STM-16 and STM-64 data rates to be achieved at 4,16 & 64 times the STM-1 rate.Byte-interleaving the payloads from a number N of STM–1, forms higher levels of the synchronous hierarchy. The process of creating higher layer data rates from lower ones also require that a transport overhead of size N times that of an STM–1 is added containing new management data and pointer values as appropriate. STMs created in this way range upwards from STM–1 at 155.52 Mbps by integer multiples of four with no theoretical limit.
The SDH data rates applicable to the appropriate STMs, as obtained by reference 1, 2 & 3, are approx. These are shown in the table below:
| STM Standard | Bit Rate |
|---|---|
| STM-1 | 155 Mbits/s |
| STM-4 | 622 Mbits/s |
| STM-16 | 2.5 GMbits/s |
| STM-64 | 10 Gbits/s |
To understand the amount of traffic each STM layer can handle, an example is detailed below using 2.048Mbit channels carrying PCM- 30 voice channels as the input traffic.
Low order user inputs are mapped into low order STM-1 containers that can be in turn byte interleaved into higher order STM containers to obtain the desired transmission capacity and data rates.
SDH is designed to transport isochronous traffic channels and is based on a hierarchy of continuously repeating fixed length frames. It has been designed to preserve smooth interworking with existing PDH networks and has adopted a synchronous frame structure that preserves the byte boundaries within the various traffic bit streams. How it achieves this is through the use of Virtual Containers (VCs), Tributary Units (TUs), Tributary Unit Groups (TUGs) & Authentication Unit Groups (AUGs).
To understand how this is achieved it is important to understand the basic frame structure of an SDH frame. The Basic SDH Frame Structure Diagram below details this.
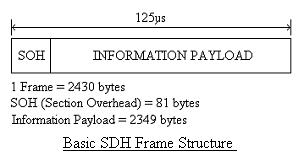
It should be noted that in reality the 81 bytes comprising the Section Overhead (SOH) are not one continuous block but are spread out throughout the Information Payload (IP). Also each byte within the payload represents one 64kbit/s channel.
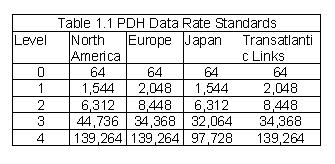
The SDH frame structure is tailor maid to transport 64kbits/s data channels, the backbone of PDH networks. Other higher data rate channels, which are a multiple of 64kbits/s, can also be easily accommodated such as data rates of 2.048Mbit/s, 34 Mbit/s and 140Mbit/s as used within UK PDH networks. It can also support their North American counterparts 1.5 Mbit/s, 6 Mbit/s and 45 Mbit/s. Table 1.1 indicates the worldwide PDH data rates that SDH must be able to support.
The way various PDH data circuits are transported over SDH is to enable each type of circuit to be mapped into a synchronous container. In reality there are only a few types of container presently required. These container types are classed as follows:
Each of these containers goes through several stages of multiplexing to enable them to become part of one overall type of frame structure. This overall frame structure is known as an STM frame. The basic STM frame on which all other STM frame structures are based within SDH is the STM-1.
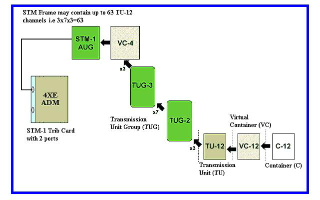
Below is a diagrammatic representation of the various levels of multiplexing that a “container” must go through to be mapped within an STM-N frame. This diagram is a standard diagram often used to represent SDH container levels.
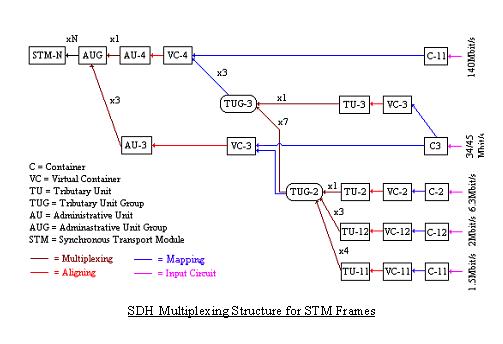
In the multiplexing process, payloads are layered into lower-order and higher-order virtual containers, each including a range of overhead functions for management and error monitoring. Transmission is then supported by the attachment of further layers of overheads. This layering of functions in SDH, both for traffic and management, suits the layered concept of a service-based network better than the transmission-oriented PDH standards.
To illustrate how this multiplexing structure works let us examine how a 2.048Mbit/s circuit is mapped into a STM-1 frame. The basic flow process for this is as follows:
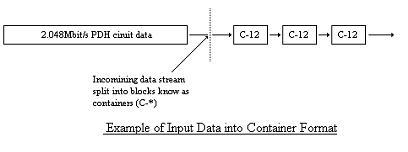
2.048Mbit/s Into C-12
The first stage of the multiplexing process is to split the incoming data into separate blocks known containers as shown below. In the case of a 2.048Mbit/s circuit this process outputs C-12 containers.
C-12 Into VC-12
The next stage of the multiplexing process is to convert the container C-12 into a Virtual Container (VC). Adding Path Overhead (POH) information to the front of the container does this. This part of the process is known as mapping the container into a VC.
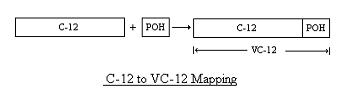
The POH bytes added to the container stay with it and remain completely unchanged until it arrives at its final destination i.e. exits the SDH network. The addition of the VC POH allows a network provider to monitor several parameters. Most importantly it can monitor the transmission error rate of the VC across the SDH network. The points where a data circuit enters/exits the SDH network are known as path termination points (PTP) and the route it takes between these points is known as the path. This level of POH can only indicate the amount of errors caused by transmission across the path and not the source of the errors.
It should be noted that VCs are created at several levels within the SDH multiplexing hierarchy. This VC hierarchy ends when a VC is loaded into the payload area of a STM frame. A VC is never presented directly to the outside world but only exists within an SDH piece of equipment or STM signals i.e. there are no VC interfaces within a SDH network.
A SDH network may have many input circuits running at various data rates. These inputs are required to be multiplexed together to form a STM frame. However, none of these circuits are synchronised together and therefore cannot be held in rigid sychronisation within the STM frame. The problem faced when designing a SDH network was how to synchronously multiplex and demultiplex many individual VCs, which because they have been created in disparate parts of the same, or even different SDH networks, may have slightly different short term bit rates.
The solution used by SDH is to assign pointers to each individual VC. When a VC is multiplexed into a larger VC it’s phase offset in bytes can be identified relative to a reference point in the larger VC. The addition of this pointer to a VC at this stage creates a Tributary Unit (TU). In this case it would form a TU-12.
The addition of the pointer at this stage is known as aligning.
The incoming data circuit has now been processed to a stage that can now be multiplexed within the SDH network.
A TU-12 can now be multiplexed into a Tributary Unit Group (TUG) with other TUs. The SDH Multiplex Structure Diagram shows that up to three TU-12s or four TU-11s can be multiplexed into a TU-12. In actuality a mixture of TU-11 & 12s can be multiplexed together to maximise the TUG-2 capacity. It should be noted that a combination of TU types (i.e. TU-11 & 12) may be multiplexed together to form the TUG-2.
For the purposes of this example we are assuming that the TU-2 is further multiplexed to form a TUG-3. This is only one way that the TUG-2 could have been forwarded on to form part of the STM frame. It could have had more POH bytes added to it to form a VC-3.
A process of Byte Interleaving achieves multiplexing of TUs into TUGs, or TUGs into larger TUGs. Byte interleaving is illustrated below.
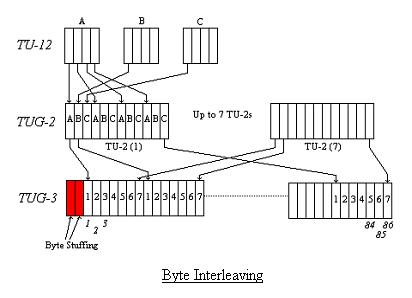
In our example the TUG-3 would then have another lot of POH data added to it to form a VC-4 container.
Another pointer is added to the VC-4 to form an Administrative Unit (AU). Again this allows the VC-4 to vary in respect to the STM by tracking this pointer.
Further overheads are added to the AU-4 to form an Administrative Unit Group (AUG). Also up to three AU-3s can be multiplexed together to form an AUG. The AUG has a fixed position within the STM-1 frame.
Finally further overhead bytes are added to the AUG to form a Synchronous Transport Module or STM-1. This is the fundamental transmission block within a SDH network.
The data rate of an STM-1 frame is 155.52Mbit/s. 140Mbit/s of this is the original circuit information with the other 11% of transmitted data comprising the overheads added.
The STM also has to be able to deal with slight asynchonism caused when a network element loads a VC that it did not create into a STM. Pointers are again used as is detailed by the TUG-3 � VC-4 example. One important difference to note is that where a VC-4 frame slips in time relative to the STM SOH, correction is achieved by 3 bytes at a time rather than the single byte change.
During commissioning one of the pathways to be tested was set up with a connection command
“c s14-8 s6-1-j4-k271 & s8-1-j4--k271”.
What does it mean?
If you can’t answer now don’t worry. Hopefully you will be able to figure it out after KLM notation is explained.
The answer to the question is given at the end of the explanation.
Within a SDH network it is important to be able to assign channels to different pathways to allow correct routing of information.
This means that an engineer must be able to identify specific channels at any network node.
For example a 2.048Mbit/s tributary may be required to be outputted on a SDH aggregate from a Nortel TN- 4XE switch.
The way a channel is identified at a node is by the use of KLM notation system.
This system allows for the identification of the associated interface card slot within the equipment, the STM and the applicable TUGs/TUs within that STM.
The notation details the following information:
· Associated card slot within equipment.
· Associated port on card.
· Associated STM frame.
· Associated TUG3 within STM frame.
· AssociatedTUG2 within TUG3.
· Associated TU within TUG2.
 click on to view full size image(34K).
click on to view full size image(34K).
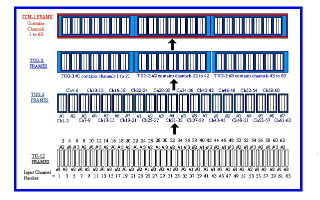
KLM Notation Example Diagram.
The KLM Notation Example Diagram, has been provided to help explain how KLM notation,
along with KLM Numbering Chart helps explain the KLM numbering associated with TU-12s,
TUG-2s & TUG-3s contained within an STM-1 frame.
 click on to view full size image(70K).
click on to view full size image(70K).
In the example being used a STM-1 tributary is being connected to port 1 of a 2 port STM-1 tributary card (KLM Notation Example Diagram).
The actual channel that we are concerned with within the STM-1 frame is channel 49.
The first part of the notation to be used must indicate the slot number of the tributary card.
KLM Notation Example Diagram illustrates that the STM-1 tributary is being connected to a card in slot 1 of the shelf.
It can also be seen that it is connected to port 1.
The notation used to indicate this would be “S1-1”.
Note: if port 2 was being used it would be “S1-2”.
The next part of the notation indicates the STM frame associated J1 byte.
As this is a single STM-1 frame there is only a single J1 byte.
Therefore the notation used would be “J1”.
Note: If this was a STM-4 frame and we where interested in the second STM-1 frame held within it the notation would be “J2” etc.
The final part of the notation is to indicate the TU-12, TUG-2 and TUG-3 associated with channel 49.
From the KLM Numbering Chart it can be seen that TUG-3 #3 is the one that is associated with Channel 48.
Also it can be seen that the TUG-2 associated with TUG-3 #3 that will carry this channels will be TUG-2 #2. Finally it can be seen that the TU-12 container that would be used to contain this channel within the TUG-2 #2 frame would be TU-12 #3. Therefore, as the notation lists the TUG-3 followed by the TUG-2 and finally by the TU-12 the notation in this case would be “323”.
This means that the full notation string to indicate channel 48 of the STM-1 frame connected to port 1 of a card in shelf 1 of a 4XE would be “S1-1-J1-323”
Although this notation looks relatively complex once the fundamental rules are grasped it becomes reasonably easy to implement.
You should now be able to understand that the connection command “c
s14-8 s6-1-j4-k271 & s8-1-j4--k271” provided the following:
. “s14-15 s6-1” - Connected traffic on port 15 of the card in slot 14
. “j4” – This assigned the traffic from Port 15 of the 2 Mbit Trib Card
. “k271” – This assigned the traffic to TUG-12 #1 within TUG-2 #7,
. “s8-1-j4--k271” – this provided path protection on the Aggregate B card
(2Mbit Trib Card)
to port 1 of the card in slot 6 (4XE Aggregate A)
to the fourth STM-1 frame within the outgoing STM-4 frame.
in turn within TUG-3 #2 of this STM-1 frame.
This corresponds to Channel 40 of the 63 Channels within this frame.
using the 4th STM frame , Channel 40.


